by Amnad Tongtib, Ph.D. student
Advisor: Assoc. Prof. Dr. Theeraphong Wongratanaphisan
Description of Project:
Patients who cannot move part of body from accident, medical surgery, injury form sport playing, spinal cord injury or clogged arteries, require recovering. From this reason, the patient will be rehabilitated by physical therapist. In rehabilitation, the patient generally requires close care from a physical therapist. However, the rehabilitation tasks are repetitive over lengthy time. This causes physical therapists to be tired. From this reason, concept of using robot(s) to assist physical therapists is appealing.
Rehabilitation with robots can be divided into two main area: leg and arm. The leg rehabilitation includes hip, knee and ankle part and the arm rehabilitation includes shoulder, elbow, forearms, wrists and finger part. There are two main types of rehabilitation robot: exoskeleton robot and end-effector type robot. The exoskeleton robot employs serial mechanical structure that align with part of body to be treated, leg or arm. The joints of the robot must be aligned with rotation of joints of the body to generate the motion. For example, if we want to treat legs (hip and knee), we will use two-link serial mechanism attached to the leg. The motor will be attached to align with the hip joint and the other motor will align with the knee joint. Then, the robot will operate with pre-specified joint-space motion. In the end-effector type, the end-effector of the robot is attached to the body part and take this part to move in pre-specified path in three dimensional space. Advantage of this type is that the robot does not necessary to attach to many locations on the body part as in exoskeleton type. Therefore, the patient feels more comfortable. In this project, the parallel robot for arm rehabilitation will be analyzed, designed and built.
Objective:
1. To analyzes and design parallel robot for arm rehabilitation.
2. To study and design smooth path generation of the robot for arm rehabilitation.
3. To study algorithm for designing a 3-legs parallel robot with optimization technique.
Gait training robot Overview:
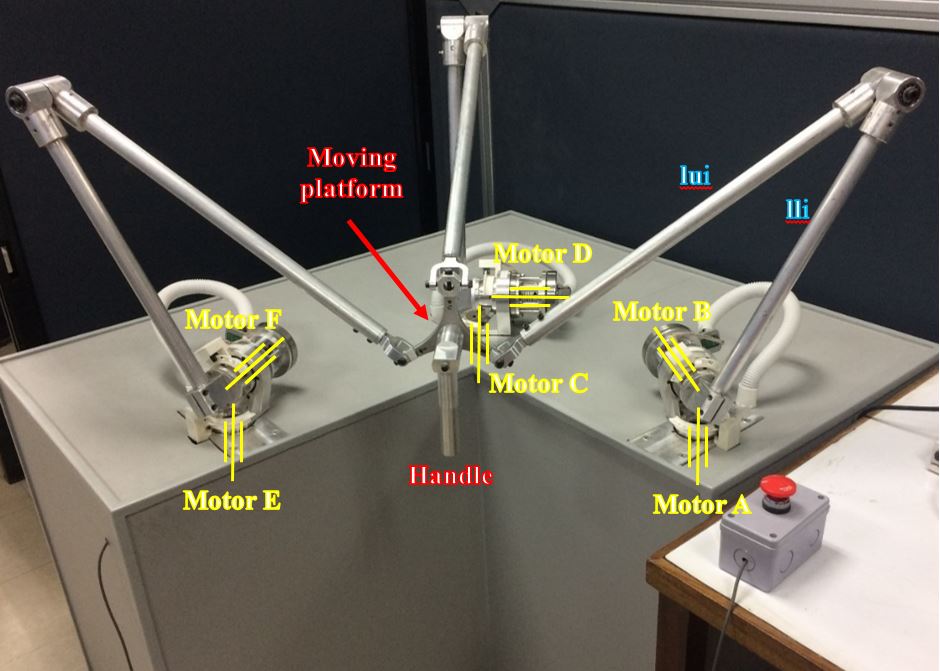
In establishing arm rehabilitation robot, mechanism of the 3- parallel robot is used to build the robot. Moving platform connected to fixed base with three link chains (or leg), each leg consist of two rigid body (lli and lui) which connected by revolute joint, end of leg connected to moving platform with gimbal joint (spherical joint is replaced with gimbal joint because range of motion of gimbal more than spherical joint) and the other end connected to base with two actuators. The robot has six actuators which are brushless DC motors. Two motors in each leg are installed at the fixed base with the perpendicular direction. At center of moving platform, we install the handle to catch the patient’s hand. Mechanism of the robot is shown in Figure 1.
Robot Structure Design:
The gait training robot is designed as exoskeleton type, which is a two-leg robot with four DOFs as shown in Fig. 2. Each hip and knee joint is a revolute joint, which can flexion and extension movements in the sagittal plane. The mechanical ranges of the hip and knee joints are from -45 to 35 degrees and 0 to 65 degrees respectively. The robot is equipped with a ball screw actuator to drive each joint. Joint motion of each joint is calculated form measuring signals of a potentiometer as installed at each joint shaft and an encoder as installed at the end of each joint’s actuator. There are three load cells at cuffs for each robot leg in order to measure interaction forces from a subject leg. The interaction forces are used to make compliance into the robot control between the training.
Moreover, the robot can be adjusted parts for fitting each subject body as follows. The upper and lower robot leg lengths can be adjusted from 350 to 480 mm and 290 to 380 mm respectively. The pelvic width and back and pelvic cushions can be also adjusted for the subject’s comfortable. The cuffs can be adjusted for appropriating each subject leg.
Publications:
- Amnad Tongtib and Theeraphong Wongratanaphisan “Concept for Using a 6-DOF Parallel Manipulator In Passive Upper Limb Rehabilitation”; The 12th International Convention on Rehabilitation Engineering and Assistive Technology 14-16 July 2018 in Shanghai, China.
- Amnad Tongtib and Theeraphong Wongratanaphisan “Kinematic analysis and Workspace Analysis of a 3- Parallel Robot’’; Joint Symposium on Mechanical-Industrial Engineering, and Robotics 2017(MIER2017) 16-17 November 2017 in Chiang Mai, Thailand
- Amnad Tongtib, Pinyo Puangmali and Theeraphong Wongratanaphisan “Kinematic analysis of a 3- Parallel Robot’’; The 7th TSME International Conference on Mechanical Engineering, 13-16 December 2016 in Chiang Mai, Thailand.
Acknowledgment:
This project is partially supported by 1) Mid-Career Researcher Grant, Chiang Mai University and 2) the Center Mechatronic System and Innovation, Chiang Mai University.