by Tarapong Karnjanaparichat, Ph.D. student
Advisor: Assoc. Prof. Radom Pongvuthum
Description of Project:
Many research studies have shown that patients losing motor control due to spinal cord injuries, stroke or other neurological injuries can regain their motor control if their limbs are trained to move in repetitive patterns. Manual treadmill training has been an established gait training method for over two decades. During the manual gait training, the patient has to be manually guided to produce a walk-like gait pattern by two or three physiotherapists placed next to the patient’s legs and pelvis. The patient is partially unloaded from the patient’s body weight and the legs as well as the pelvis are moved and guided by the physiotherapists. Therefore, the actual training duration and number of training sessions are limited, because this is a very tiring work for the therapists. Moreover, it is difficult to induce a constant and repetitive gait pattern during training. The induced gait pattern can be physiologically incorrect, because of the fatigue of the physiotherapists form training patients. In order to increase the duration of the training and to reduce the effort of the physiotherapists, the treadmill training has been automated.
The initial gait training robot developments are purely position-controlled. The patient legs are moved along predefined and fixed reference gait pattern. Muscle activity of the patient is ignored, and the patient legs are forced to follow a given gait pattern imposed by the robots. Recently, many researches are emphasized on improving the patient participation and the generation of afferent sensory input, which is the basis of the neurological recovery. Compliance is considered an important prerequisite for safe human-robot interaction. Due to their actuation system and control approach of gait training robots often lack of compliance. The patient may feel pain or uncomfortable. Adding compliance into the system can help in absorbing interaction forces and ensure safety of the patient.
Objective:
The objective of this research is twofold:
- Build a gait training robot for training for patients with neurological injuries.
- Develop an adaptive compliance control scheme for a gait training robot without joint velocity measurement under the assumption those physical parameters of both human and robot, such as mass, inertia and friction, are unknown.
Gait training robot Overview:
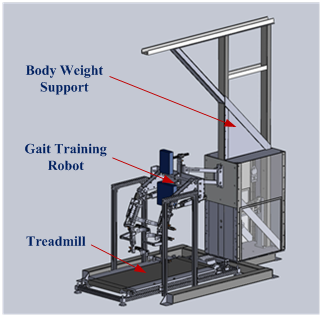
The gait training robot system consists of a gait training robot, a treadmill and a body weight support device as shown in Figure 1. During the gait training, the robot, which is attached to the subject’s legs, will guide the legs to move in a predefined physiological gait pattern on treadmill.
Robot Structure Design:
The gait training robot is designed as exoskeleton type, which is a two-leg robot with four DOFs as shown in Fig. 2. Each hip and knee joint is a revolute joint, which can flexion and extension movements in the sagittal plane. The mechanical ranges of the hip and knee joints are from -45 to 35 degrees and 0 to 65 degrees respectively. The robot is equipped with a ball screw actuator to drive each joint. Joint motion of each joint is calculated form measuring signals of a potentiometer as installed at each joint shaft and an encoder as installed at the end of each joint’s actuator. There are three load cells at cuffs for each robot leg in order to measure interaction forces from a subject leg. The interaction forces are used to make compliance into the robot control between the training.
Moreover, the robot can be adjusted parts for fitting each subject body as follows. The upper and lower robot leg lengths can be adjusted from 350 to 480 mm and 290 to 380 mm respectively. The pelvic width and back and pelvic cushions can be also adjusted for the subject’s comfortable. The cuffs can be adjusted for appropriating each subject leg.

Controller implementation:
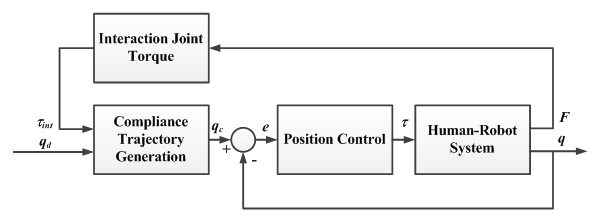
The control scheme consists of two parts in Fig. 3. First, the desired hip and knee gait trajectories are fed to a virtual spring-mass-damper model to generate reference hip and knee trajectories for a position controller in second part. The reference trajectories allow to be deviated from the desired gait trajectories depending on interaction forces between the patient and the robot. The reference trajectories are then fed to the position controller.
The control scheme provides compliance to muscle forces from a patient. The virtual spring-mass-damper model of each leg can be arbitrarily specified to achieve desired compliant dynamic behaviors to provide optimal trade-off between the patient’s safety and gait performance.
Publications:
- T. Karnjanaparichat and R. Pongvuthithum, “Dynamical Analysis for Mechanical Design of Gait Training Robot”, The 26th Conference on Mechanical Engineering of Thailand (ME-NETT 26), 27 October 2012.
Acknowledgment:
This project is supported by National Electronics and Computer Technology Center (NECTEC), Thailand.