by Boonruk Suchaitanawanit, Ph.D. student
Advisor: Assoc. Prof. Matthew Cole
Time-Optimal Control
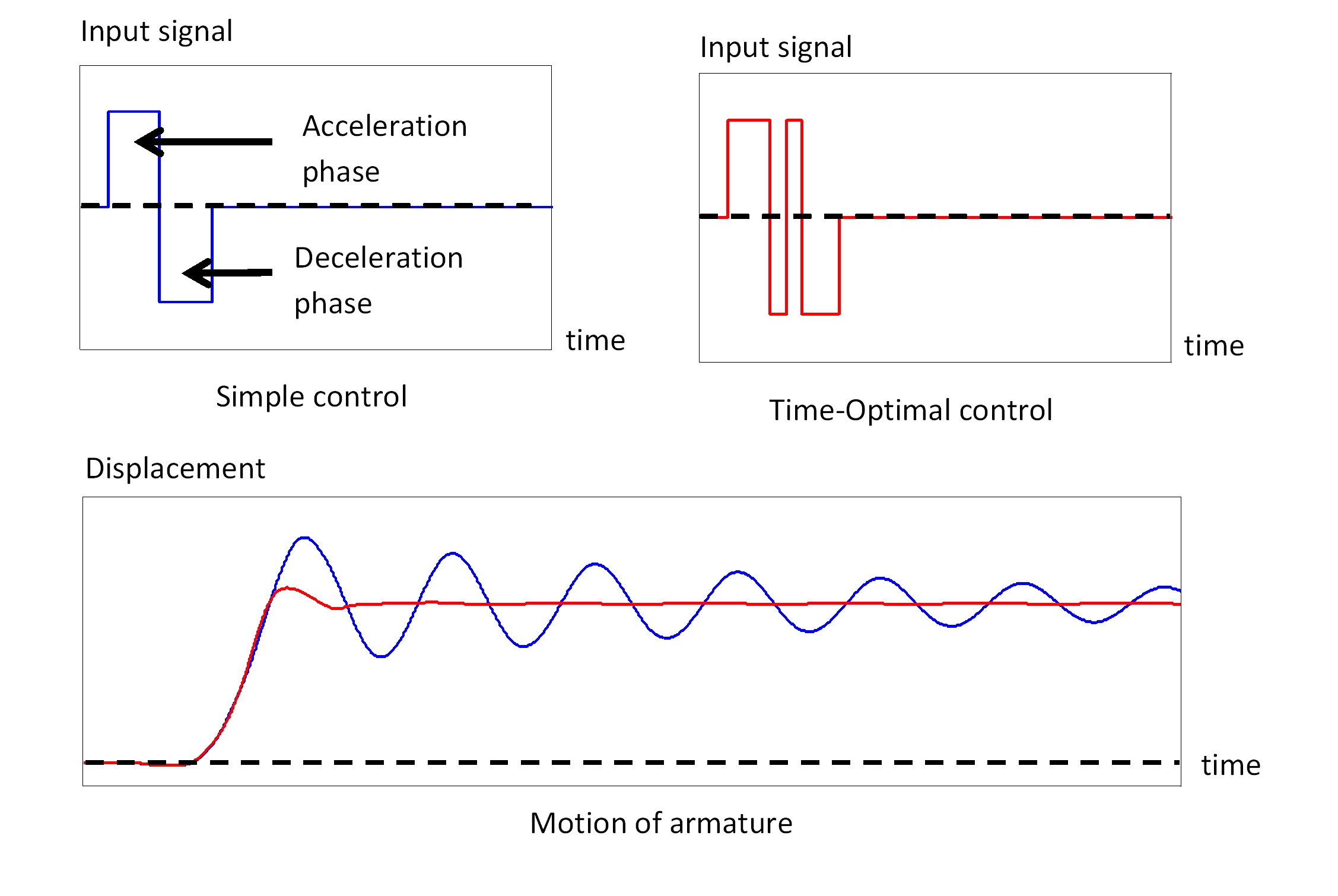
Nowadays many engineering operations require rapid movement with high precision. To acquire maximal speed of motion, an extreme value of actuation effort is employed which could lead to excitation of the flexible mode causing undesired vibration. The time interval can be minimized by a bang-bang control. However, with correct timing of switching action. vibration can be minimized. In this research, we focused on finding the correct timing for the switching action whist minimizing the interval of motion. Real world applications of time-optimal control includes motion of the flexible structures are such as hard-disk drive, crane and spacecraft structures.
Structural Optimization
Conventionally, mechanical structure design and controller design are separate procedure. By combining two processes together, a better performance of the system could be achieved. A structure whose parameters are compatible with the tasks, might achieve better time performance the one that are not. The selected case study in this research involves tuning a stiffness of the flexible structure to match with the travelling distance associate with time-optimal motion.
Objective
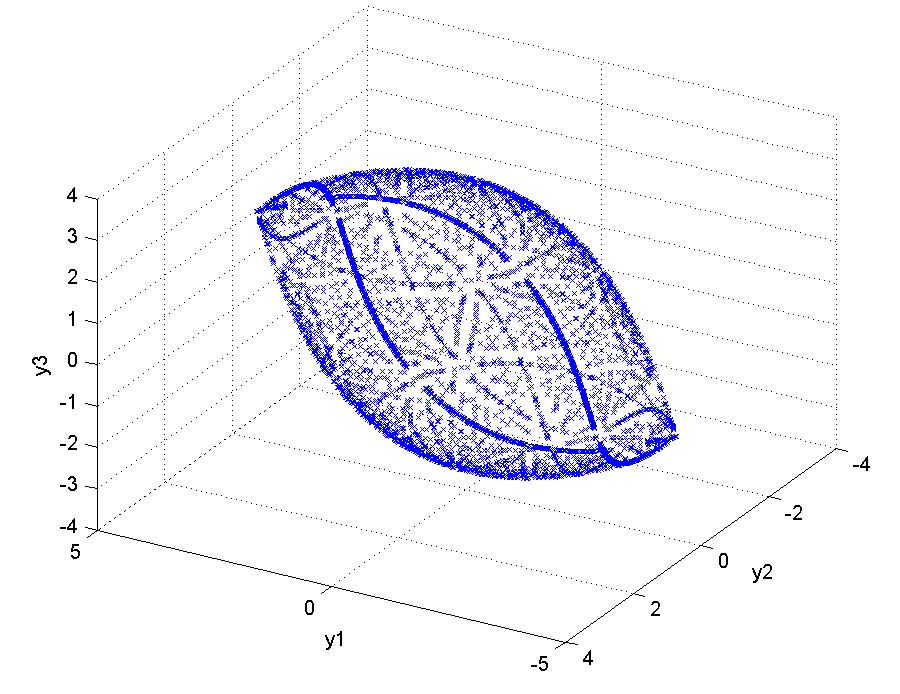
The objective of the project is to develop a new mathematical strategy based on the convexity of the reachable set in order to solve time-optimal control problem. The proposed algorithm can guarantee the true optimality of the control solution since it solves directly for co-state variables which satisfy the necessary conditions rather than searching for switching time and later verify the optimality by using Pontryagin’s Minimum Principle. Figure 1 shows the example of the reachable set of 3 states linear model of the flexible structure.
The system along with time-optimal control solutions acquired by the proposed algorithm will be tuned to achieve even faster motion. The tuning algorithm uses iterative scheme to alter the structural parameters and control profile in order to reduce the motion interval. By exploiting the continuity of the reachable set the iterative tuning method based on the steepest descent gradient searching is able to move toward the local minimum.
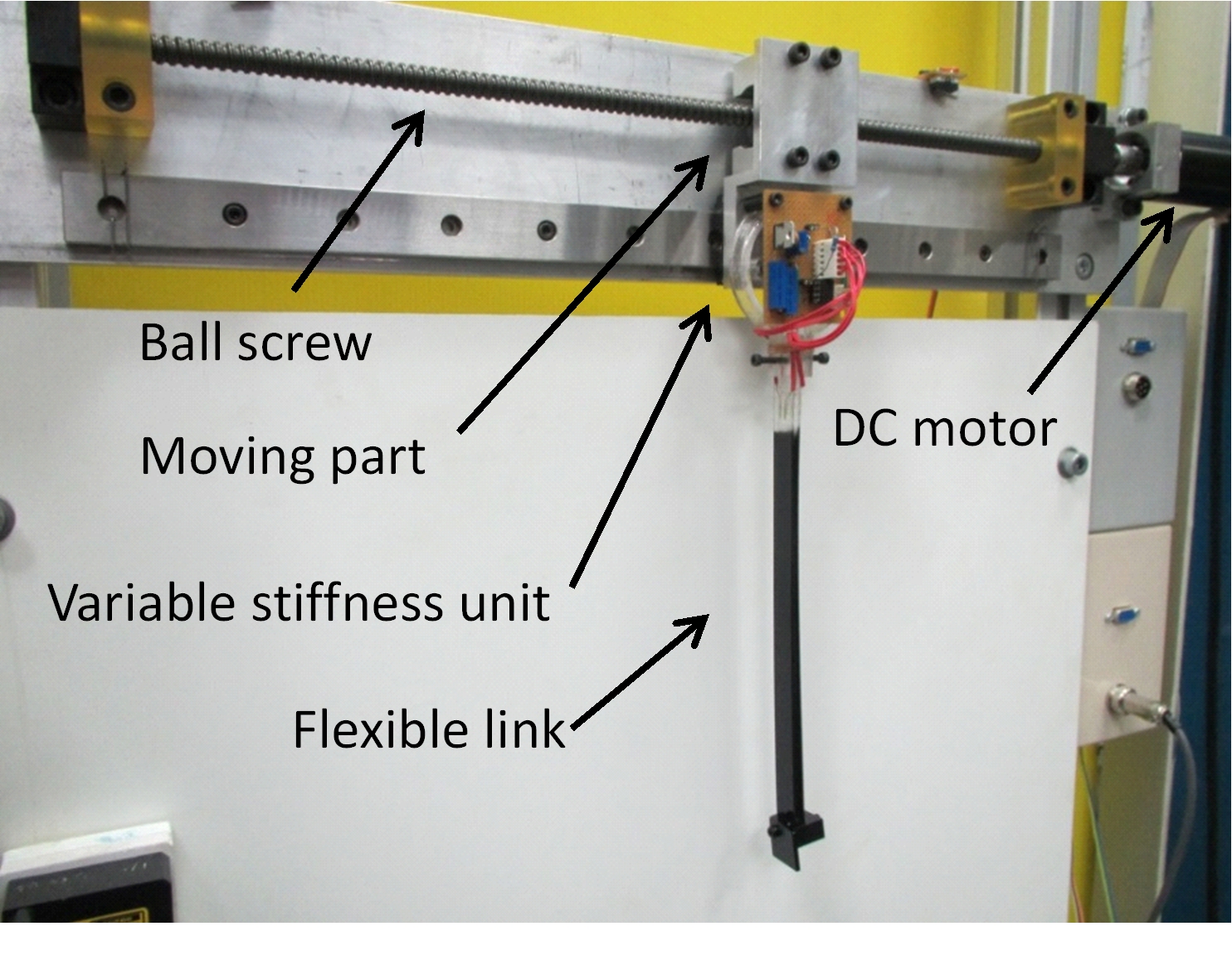
The obtained solution was verified and applied on the experimental rig (fig. 2). Here linear translation of the crane-like structure with flexible armature is to provide vibration free rest-to-rest motion. Solution are shown in figure 3. The rig has tunable stiffness mechanism which allows natural frequency and damping ratio of the flexible link to be tuned for verifying the simulation results.
Publication
- B. Suchaitanwanit and M.O.T Cole, “An Algorithm to Obtain Control Solutions Achieving Minimum-Time State Transfer of Linear Dynamical System Based on Convexity of The Reachable Set”, In Proceeding of the 4th International Conference on Intelligent Systems, Modeling and Simulation, Vol. 1, pp. 340-345, 2013.
- B. Suchaitanwanit and M.O.T Cole, “Fundamental Limit of Performance in Minimum-Time Motion Control due to Structural Flexibility”, In Memoirs of Muroran Institution of Technology, Vol. 6, pp. 7-12, 2013.
The project is partly support by Royal Golden Jubilee (RGJ) project under care of Thailand Research Fund (RGJ).