By Wasin Wongkum
Advisor: Assoc. Prof. Theeraphong Wongratanaphisan
Delta Robot
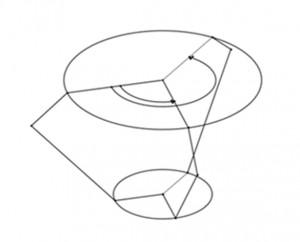
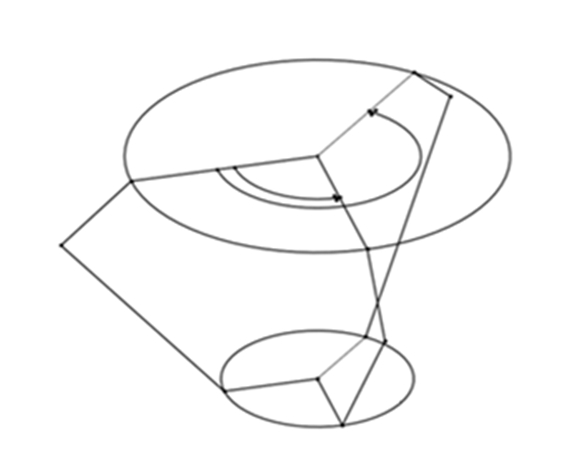
Delta Robot is a popular parallel robot which has 3 degree-of-freedom. It is used widely for packaging industry. The advantages of the Delta robot are high strength, high agility, low inertia and high precision making it suitable for high-speed & high-precision applications. Typically, parallel robot has complicated kinematic. However, the kinematic of Delta robot is quite simple.
Most Delta robots are symmetric in its structure i.e., each legs is installed on the base 120 degrees apart. For this the workspace of the robot is symmetric. However, in some applications, it may occur that the task space are not necessarily symmetric. This project focuses on synthesis of an asymmetric Delta robot.
Objective
- To study effects of the kinematics and workspace of the Delta robot which has different arm length and arm angles.
- To synthesize an asymmetric Delta robot optimized for a certain workspace.