Chakkapong Chamroon and Assoc. Prof. Dr. Matthew O.T. Cole
Project description:
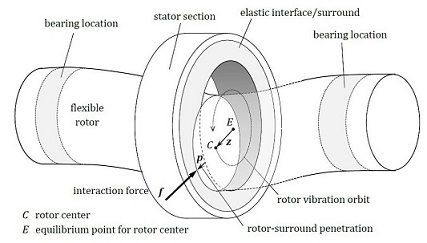
When a machine rotor is running through critical speeds, there is a chance of rub with its stator. This may lead the machine to malfunction or cause damage. If rub behaviour can be predicted accurately then this failure may be prevented. The Lyapunov stability condition based on state space model approach will be considered in this research because it is able to treat non-linear elements and ensure that the stability of system is preserved. It can deal with multiple non-linear feedback terms. The overall aim of this research will be to develop stability criterion based on state space models and control strategies which can be implemented on a real machine for preventing rotor-stator contact instability.
Focus:
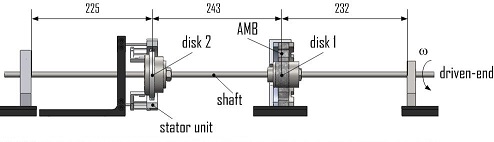
This work focuses on active vibration controller design to stabilize a rotating machinery undergoing contact between rotor and stator. The controllers are designed for an active magnetic bearing actuator and are based on Lyapunov stability criteria of the contact-free orbits.
Check this video tube for result:
Sponsors:
- Office of the Higher Education Commission of the Royal Thai Government
- The Thailand Research Fund
Publications:
C. Chamroon, M.O.T. Cole and T. Wongratanaphisan, “An active vibration control strategy to prevent nonlinearly coupled rotor-stator whirl responses in multimode rotordynamic systems”, IEEE Trans. Contr. Syst. Technol., available online DOI 10.1109/TCST.2013.2265740.
M. O. T. Cole, C. Chamroon, P. Ngamprapasom, “Forcefeedback control for active stabilization of synchronous whirl orbits in rotor system with nonlinear stiffness elements”, ASME J. Vib. and Acoust., vol. 134, no.2, 021018, 2012
Conference Proceedings:
Chakkapong Chamroon, Matthew O. T. Cole, Theeraphong Wongratanaphisan and Radom Pongvuthithum, “Achieving Globally Stable Active Vibration Control in Nonlinear Rotordynamic Systems”, International Graduate Research Conference, Chiang Mai, Thailand, December 20, 2013.
Chakkapong Chamroon, Matthew O. T. Cole and Theeraphong Wongratanaphisan, “An active vibration control strategy to prevent friction-driven backwards whirl in rotordynamic systems”, The 4th TSME International Conference on Mechanical Engineering, Pattaya, Thailand, October 16-18, 2013.